

Opis
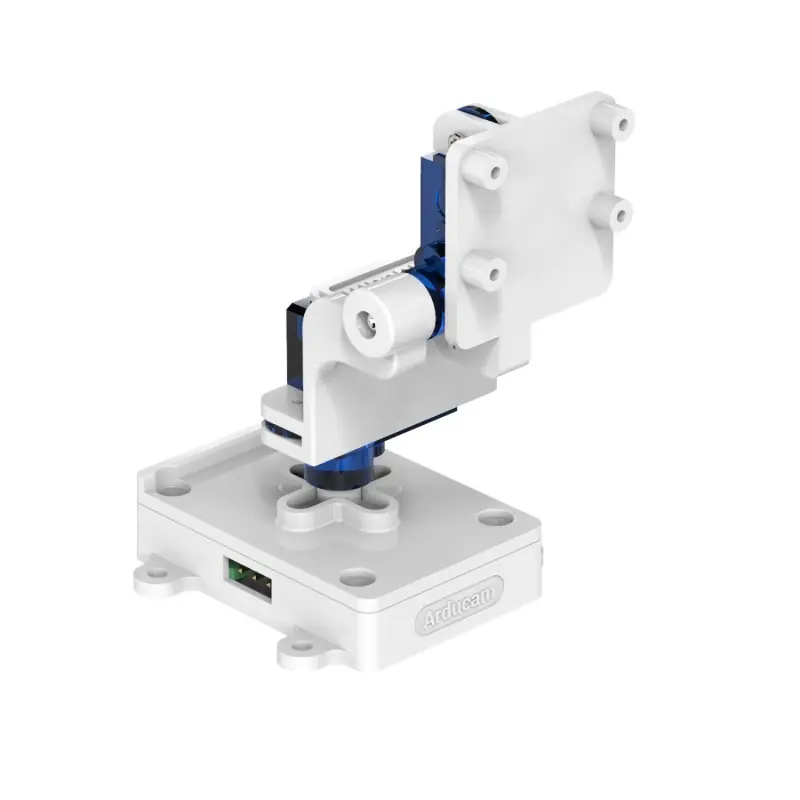
Zestaw platformy sterującej 2 DOF przeznaczony do minikomputerów Raspberry Pi, Nvidia Jetson Nano oraz Xavier NX. Platforma oparta została o dwa cyfrowe serwomechanizmy pozwalające na sterowanie położeniem kamery w dwóch wymiarach, wykonując ruchy o 180 stopni w poziomie i pionie. Za sterowanie serwomechanizmami odpowiada dedykowana płytka z 12-bitowym sterownikiem PWM umieszczona w dolnej podstawie platformy. Pełna dokumentacja wraz z instrukcją montażu dostępna jest na stronie produktu.
Właściwości
Serwomechanizm GH-S37D
- Moment obrotowy: 0,6 kg/cm przy 3,6 V, 0,8 kg/cm przy 4,8 V.
- Prędkość robocza: 0,13 s/60° przy 3,6 V, 0,09 s/60 ° przy 4,8 V.
- Napięcie robocze: 3,6 v do 4,8 v
- Prąd: 350mA
- Strefa nieczułości: 3 usec
- Wymiary: 20 x 8,75 x 22 mm
Płytka sterująca PWM
- Rozdzielczość PWM: 12 bitów
- Interfejs komunikacyjny: I2C
- Napięcie robocze: 3,3 V/5 V
- Wymiary: 38 x 28 mm
W zestawie
- 2 x Serwomechanizm cyfrowy
- Zestaw elementów wspornika i śrub
- Płytka sterująca PWM
- 4 x Przewód połączeniowy F-F
- 2 x Przewód połączeniowy M-F
- Instrukcja